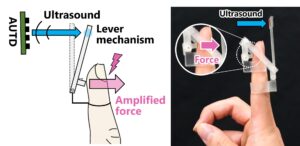
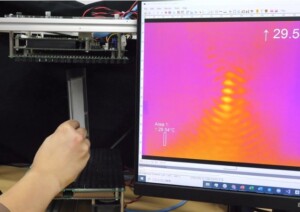
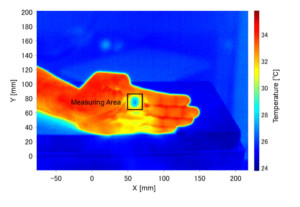
空中に浮かぶ立体的な触覚像が実現すれば, 人間の3次元空間認識能力を最大限に活かした, 直感的な三次元入力インターフェースが実現する可能性があります. 一方でこれまでの研究で, 光学的なセンシングと単焦点の走査による空間的な超音波触覚像は, およそ1kHzと言われる人間の広範囲な触覚知覚に十分に応答することはできないことがわかってきました.
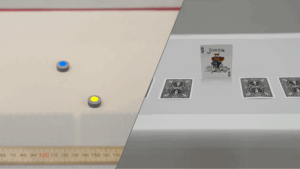
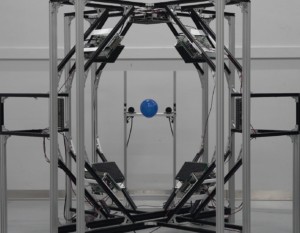
本研究では閉空間における超音波音場を制御することにより, センシングに依らない定在的な立体触覚像を得る手法を提案しています. 指位置の計測に依らずに, 指の位置によって提示する圧力が決まるため, 弾性を持つ物体や, 空間的なテクスチャの提示が可能です.
,
例えば, 空中立体映像と重畳することにより, あたかも実際の物体を操作しているかのように, 正確で高速な操作を実現できる可能性を秘めており, バーチャル手術支援インターフェースや、三次元CAD設計支援などの応用は多岐にわたります.
Seki Inoue, Koseki Kobayashi, Yasuaki Monnai, Keisuke Hasegawa, Yasutoshi Makino and Hiroyuki Shinoda, ”HORN: The Hapt-Optic Reconstruction”, SIGGRAPH 2014, Emerging Technologies, Aug 10–14, 2014
コメント