当研究室で使用しているデバイスのハードウエア・ソフトウエアは、以下のサイトから入手可能です。
*使用方法等についての問い合わせは上記 Q&A でお願いします。当研究室への直接の問い合わせはご遠慮下さい。 当研究室は上記デバイスの販売による利益の供与は一切受けておりません。
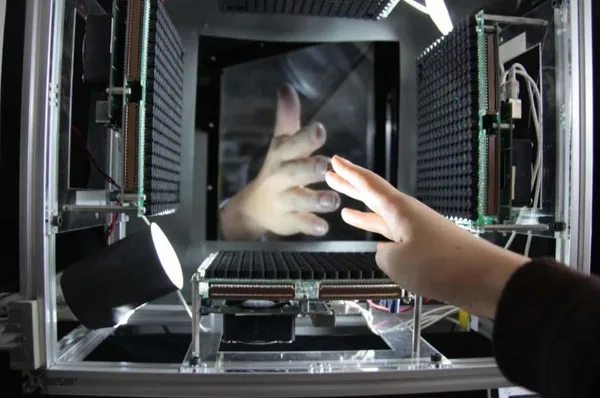
空中超音波触覚ディスプレイ (AUTD) は、多数の超音波振動子を配列した超音波振動子アレイにより、空中の任意の位置に超音波の焦点や細かい分布を作り出します。これによって、何も装着していない人体表面に触覚を提示することができます。
音のエネルギ密度の大きい超音波の焦点においては、正負に変動する音圧の平均値が上昇します。これは音響放射圧と呼ばれており、これが人体表面を押す力となります。焦点は、「フェーズドアレイ」の原理によって形成され、焦点位置は電子的に制御することができます。また、一つの焦点を作るだけでなく、計算機で逆問題を解くことによって複雑な空間分布を作り出すこともできます。
このように非接触で触覚を刺激する技術の領域は「空中ハプティクス」と呼ばれ、最も基本的な部分については 2008 年から 2010 年代の前半までに 東京大学によって提案・確立されました。 その後各国の大学や民間企業が参入し、研究開発行われています。 2020年代に入ってから、再び東京大学によってその新しい可能性が見いだされ、現在は第2世代のフェーズに入りつつあります。
第2世代の Hi-Fi 空中ハプティクス
最初の提案からの10年あまりで「空中ハプティクスによって生成される触覚は弱く特殊な振動感覚」という常識が定着していました。 その前提が2020年代に入って大きく変わり始め、現在ではしっかりした圧覚や温覚・冷覚も再現できるようになりました。 このことによって、モノの実体感や表面のテクスチャなどもリアルに伝えられるようになっています。 生成される触感はまだ完全なものではありませんが「ウエルビーイング」「学習体験」「エンターテインメント」を3本柱として 社会実装の試みも始まっています。
3次元キャラクターをリアルに再現

柔らかい3次元キャラクターの実体感をしっかりと伝える技術が 米国 SXSW 2024 で体験展示されました。 触覚と映像のインタラクションは松林によって開発され、キャラクター映像は博報堂の篠田氏のグループがデザインしました。 キャラクターとのインタラクションだけでなく、雨のリアルな感覚や、雷を連想させる感覚なども再現されています。 同様な触覚インタラクションは、大阪・関西万博 未来の都市パビリオン 日本特殊陶業プレイスで「空中感覚装置」としても展示されました。
多様な触感の再現

圧覚が再現できればVR物体の表面に触れた感覚を再現することができます。圧覚成分のみが緩やかに変化するとき、 皮膚は摩擦のない滑らかな表面を感じます。 それに加えて振動や、皮膚表面に沿った力の分布を再現してやれば、物体表面の多様なテクスチャが再現されます。 この研究の一部は NTT と共同で実施されています。
圧覚・温度の提示と計測の技術
圧覚の再現
現実的に生成できる超音波放射圧はそれほど高くはありません。皮膚の上で時間的に変化しない圧力(静圧)を生成した場合、 その刺激は触覚の閾値を超えることはなく、人間はそれを感じることができません。そのため従来の空中触覚提示では、 時間的に変動する振動触覚刺激が用いられてきました。同じ圧力であっても振動する刺激は明瞭に感じることができます。 しかしそれは「振動」として感じられ、普通にモノに触れたときの感覚とは大きく異なるものになってしまいます。 ところが近年の森崎らの研究で、ある条件を満たす動的な圧力分布を与えると、圧覚に近い感覚が生成されることが明らかになりました。 これにより、空間分解能と提示圧力の上限は前提とした上で、一種の万能性をもつ触覚提示が可能であることが示されました。
- Tao Morisaki, Masahiro Fujiwara, Yasutoshi Makino and Hiroyuki Shinoda, "Non-Vibratory Pressure Sensation Produced by Ultrasound Focus Moving Laterally and Repetitively with Fine Spatial Step Width,"IEEE Transactions on Haptics, vol. 15, no. 2, pp. 441–450, 2022, doi: 10.1109/TOH.2021.3125843. [Open Access]
- SIGGRAPH ASIA 2021 Emerging Technologies で Best Student Demonstration Award を受賞
- 関連研究が Eurohaptics 2022 Best Demo Award 3rd place に選出
冷覚の再現
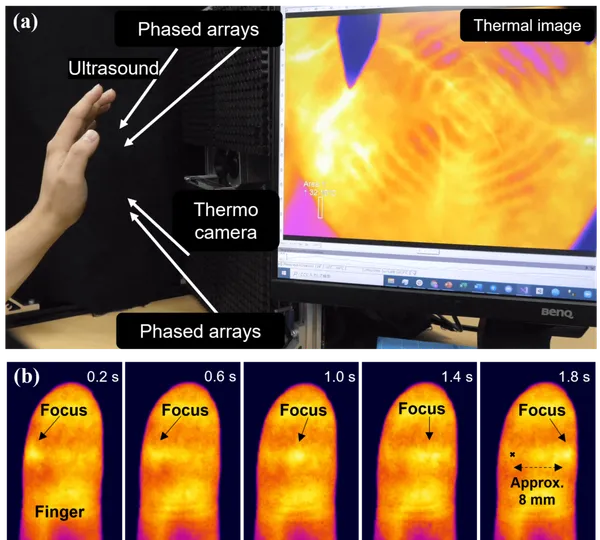
温度は質感の知覚に重要な役割を果たしていますが、非接触での温度提示、 特に冷覚の提示はこれまで困難と考えられていました。しかし2021年に中島らは、水の常温ミストが漂う中で皮膚に超音波を集束させると、 皮膚表面付近の気化熱によって皮膚温度が急速に低下することを確認しました。 超音波照射の直後から 0.5 s の間に 3 Kの温度低下がみられ,これは一般的なペルチェ素子などによる冷却と比べても遜色ありません。 また、冷却スポットを移動し、その移動を知覚可能であることも確認されています。
- Mitsuru Nakajima, Keisuke Hasegawa, Yasutoshi Makino and Hiroyuki Shinoda, "Spatiotemporal Pinpoint Cooling Sensation Produced by Ultrasound-Driven Mist Vaporization on Skin,"IEEE Transactions on Haptics, vol. 14, no. 4, pp. 874–884, 2021, doi: 10.1109/TOH.2021.3086516. [Open Access]
- 2022年 IEEE Transactions on Haptics の Best Paper Award 受賞
超音波の可視化
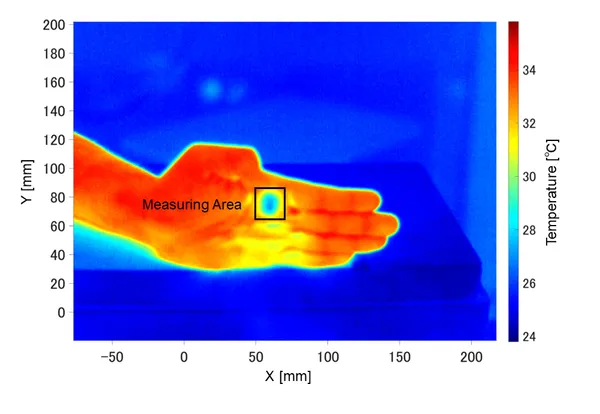
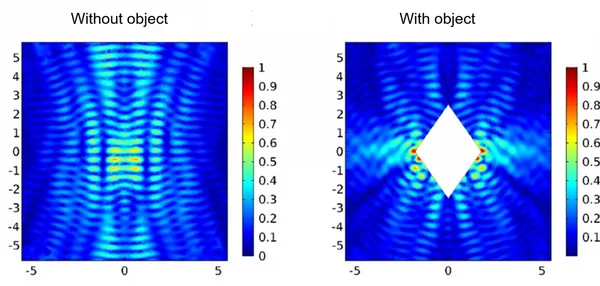
空中ハプティクスでは、空中超音波の分布を簡単に計測できないことが大きな問題でした。実用的にはマイクを自動ステージやロボットアームで動かして分布計測するしかありませんでした。このような中2021年に小丹枝らは、強力超音波の音場分布の詳細を計測する新しい方法を発見しました。サーモカメラを用いることで、3次元空間中の任意の2次元面における音圧分布を計測します。瞬時かつ高い空間分解能での計測が可能です。例えば超音波を透過するメッシュスクリーン表面の熱画像を用い、リアルタイムに二次元超音波場を可視化できます。スクリーンを動かして3次元分布を把握することも容易です。また、皮膚表面の音場分布を直接可視化することもできます。
- Ryoya Onishi, Takaaki Kamigaki, Shun Suzuki, Tao Morisaki, Masahiro Fujiwara, Yasutoshi Makino and Hiroyuki Shinoda, "Two-Dimensional Measurement of Airborne Ultrasound Field Using Thermal Images,"Phys. Rev. Applied, vol. 18, no. 4, pp. 044047, 2022, doi: 10.1103/PhysRevApplied.18.044047. [Open Access]
- arXiv (12 Mar 2022) https://arxiv.org/abs/2203.07862
2020年までの主要な成果
Lateral Modulation 法:-超音波で強い触覚を作り出す方法-
超音響放射圧を用いた触覚刺激では、デバイスの出力パワーの最大値で最大放射力が決まってしまうため、決まった力の範囲で、なるべく強く感じる刺激方法を用いる必要があります。 人間の皮膚に一定変位を与えた場合、時間的に変化しないものよりも、振動的に変化するものの方が、閾値、すなわち刺激を感じる最小変位が小さくなることが古くから知られており、その閾値は 100-200 Hz 程度で最小値をとります。そのため超音波による触覚刺激を強く感じさせたい場合、100-200Hz で振幅が変化する波形(AM波形)が用いられてきました。 それに対して近年の研究で、超音波の出力を一定に保ったまま、焦点を皮膚に沿って細かく往復振動あるいは回転移動させた方が、刺激を強く感じる事が明らかになりました。力の最大値を同一値に揃えて比較した場合、10 dB程度、あるいはそれ以上に閾値が低下します。特に50 Hz 程度の周波数でその傾向は顕著であり、腕など皮膚の有毛部でもはっきりと触覚を感じることができます。
- Ryoko Takahashi, Keisuke Hasegawa and Hiroyuki Shinoda, "Lateral Modulation of Midair Ultrasound Focus for Intensified Vibrotactile Stimuli,"in Haptics: Science, Technology, and Applications, 2018, pp. 276–288, June 13-16, Pisa, Italy.
- Ryoko Takahashi, Keisuke Hasegawa and Hiroyuki Shinoda, "Tactile Stimulation by Repetitive Lateral Movement of Midair Ultrasound Focus,"IEEE Transactions on Haptics, vol. 13, no. 2, pp. 334–342, 2020, doi: 10.1109/TOH.2019.2946136. [Open Access]
不要音の抑制
例えば上記 LM では、焦点位置を素早く動かす際に超音波位相の急速な変化が伴います。そのような位相変化は、しばしば超音波振幅の変動を引き起こし、触感の変化や不要音の発生につながります。以下の論文は、その超音波振幅変動を抑制する実用的方法を示しています。(位相変化による振幅変動および不要音の発生は、星 によって最初に指摘されました。)
指先への分布再現
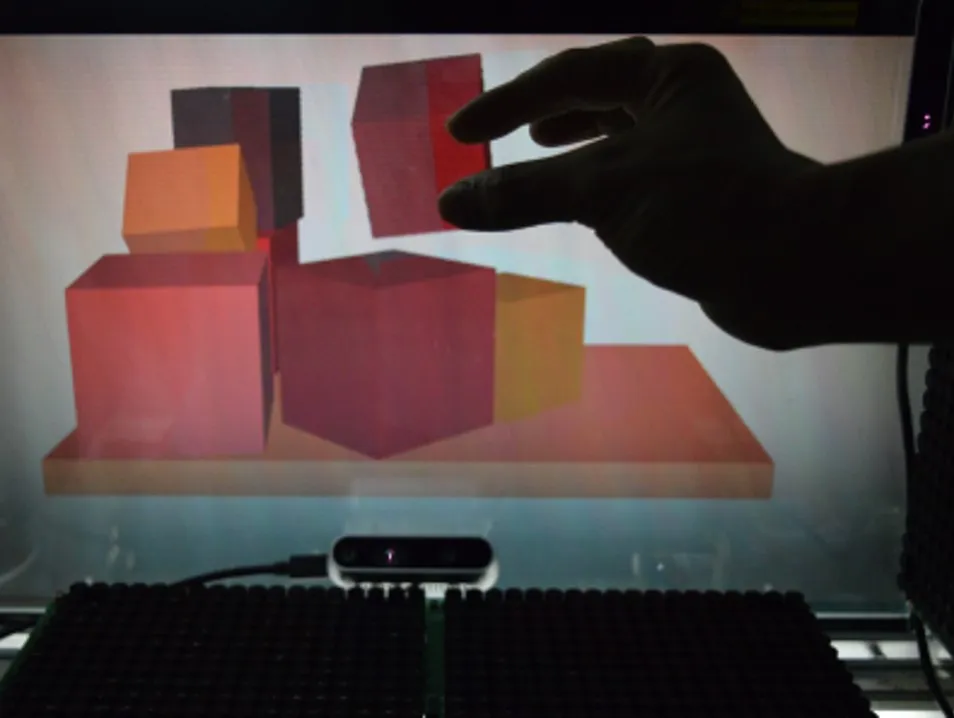
単に触れた、触れないだけでなく、3次元映像を現実のモノのように把持し、操作する感覚を再現することは、空中ハプティクスの重要問題の一つです。どのような触覚提示を行えば実物体がそこにある、という実体感が生まれるのでしょうか。 人間が現実の物体表面に触れたときは、指と対象物体の接触の深さや角度が時々刻々皮膚上で変化しており、その知覚が物体を安定把持するための重要な情報になっていると考えられます。 これまでに、高速で回転運動する焦点軌跡によって、接触深さに応じた接触面広がりをリアルタイム提示するシステムを実現しています。波長 8.5 mm の 40 kHz 超音波を用いた場合でも、全周囲をフェーズドアレイで取り囲んだ場合には、集束領域を直径 5 mm 程度まで絞ることができます。そのような収束点を走査することで、指腹での接触面積を、接触深さに応じて有意に変化させることができます。現時点のシステムにおいて、目で見ることなく物体をつまみ上げ、所定の場所に移動するタスクが実現できています。
-
Atsushi Matsubayashi, Yasutoshi Makino and Hiroyuki Shinoda, "Rendering Ultrasound Pressure Distribution on Hand Surface in Real-Time,"2020, pp. 407–415, Sep. 6-9, Leiden, Netherlands, doi: 10.1007/978-3-030-58147-3_45. [Open Access]
- Eurohaptics 2020 の Best Paper Award Finalist (3論文) に選出
- Atsushi Matsubayashi, Yasutoshi Makino and Hiroyuki Shinoda, "Direct Finger Manipulation of 3D Object Image with Ultrasound Haptic Feedback,"in Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, 2019, no. 87, pp. 1–11, May 04–09, Glasgow, Scotland Uk. [Open Access]
- Atsushi Matsubayashi, Hiroki Oikawa, Saya Mizutani, Yasutoshi Makino and Hiroyuki Shinoda, "Display of Haptic Shape Using Ultrasound Pressure Distribution Forming Cross-Sectional Shape,"in 2019 IEEE World Haptics Conference (WHC), 2019, pp. 419–424, July 9-12, Tokyo, Japan.
触覚による動作誘導
触覚パーシュート
視覚においては、注視している物体が運動するとき、それを自然に視野中心にとらえながらトラッキングすることができます。これは Pursuit と呼ばれる視覚の能力の一つですが、触覚においても同様な能力(Haptic Pursuit)が発見されています。手のひらに点状の触覚刺激が与えられ、それが横方向に移動する状況を考えてみましょう。空中触覚提示であれば皮膚の表面に沿ったせん断力は発生せず、皮膚上の圧力分布が移動するだけですが、手はその横方向移動を容易に追従することができます。人間に備わったこの能力を用いると、刺激点を目的地に移動していくことで、手を任意の地点に誘導することができます。
バーチャルハンドレイル (手の平に沿った方向の誘導)
例えばライン上を走査する点刺激を提示しておくと、手はその操作方向を簡単に知覚することができます。それに沿って手を動かすことで、視覚を用いることなく、任意の軌道を追従することができます。
手の平に対して垂直な方向の誘導
空中ハプティクスの黎明期(2008~2015)
音響放射圧による力は非常に弱いものではありましたが、それを変調することによって触覚が感じられることが示されました。 実際にモノに触れたときの触覚とは異なるものと捉えられてはいましたが、視覚情報と重畳することによって様々な触覚体験を生み出せることが実証されました。
空中超音波触覚ディスプレイ
世界で初めて超音波で触感が再現できることを報告し、基本的な特性を整理した研究
SIGGRAPH 2008 E-tech 動画
- Takayuki Iwamoto, Mari Tatezono and Hiroyuki Shinoda, "Non-contact Method for Producing Tactile Sensation Using Airborne Ultrasound,"in Haptics: Perception, Devices and Scenarios, 2008, pp. 504–513.
- Takayuki Hoshi, Masafumi Takahashi, Takayuki Iwamoto and Hiroyuki Shinoda, "Noncontact Tactile Display Based on Radiation Pressure of Airborne Ultrasound,"IEEE Transactions on Haptics, vol. 3, no. 3, pp. 155–165, 2010, doi: 10.1109/TOH.2010.4.
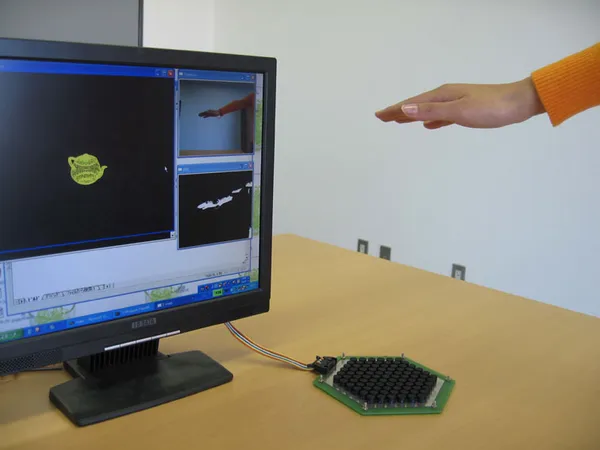
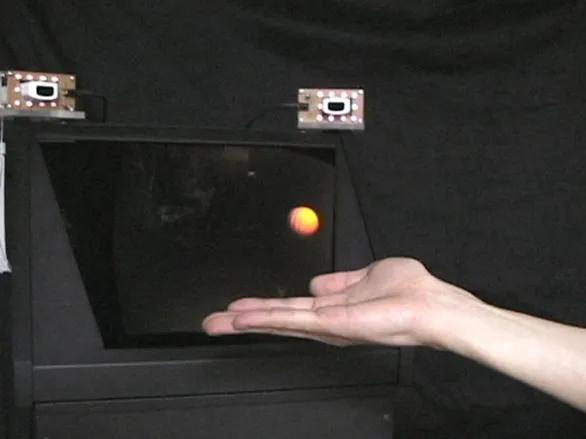
Touchable Holography さわれるホログラフィ (空中立体映像とのインタラクション)
Tactile Projector 触覚プロジェクタ (人体表面への映像と振動触覚の非干渉同時提示)

大面積での超音波フェーズドアレイと触覚プロジェクタの実証研究
(World Haptics Conference 2013 でデモ)
youtube 動画
- Keisuke Hasegawa and Hiroyuki Shinoda, "Aerial Display of Vibrotactile Sensation with High Spatial-Temporal Resolution using Large-Aperture Airborne Ultrasound Phased Array,"in 2013 World Haptics Conference (WHC), 2013, pp. 31–36, April 14-18, Daejeon, Korea.
- IEEE WHC 2013 Best paper award の Finalist および Best Student Paper Award を受賞
- Keisuke Hasegawa and Hiroyuki Shinoda, "Aerial Vibrotactile Display Based on Multiunit Ultrasound Phased Array,"IEEE Transactions on Haptics, vol. 11, no. 3, pp. 367–377, 2018, doi: 10.1109/TOH.2018.2799220. [Open Access]
Haptomime 空中触覚タッチパネル

空中映像と触覚の同期の効果を実証した研究。この研究を契機として、多くの人々が空中触覚提示に強い期待を抱くようになりました。
youtube 動画
- Yasuaki Monnai, Keisuke Hasegawa, Masahiro Fujiwara, Kazuma Yoshino, Seki Inoue and Hiroyuki Shinoda, "HaptoMime: Mid-Air Haptic Interaction with a Floating Virtual Screen,"in Proceedings of the 27th Annual ACM Symposium on User Interface Software and Technology, 2014, pp. 663–667, Oct. 5-8, Honolulu, Hawaii, USA, doi: 10.1145/2642918.2647407.
- ACM UIST 2014 People’s Choice Best Demo Award 受賞
- Innovative Technologies 2014 Industry 特別賞 および SIGGRAPH 特別賞受賞
3D 触覚ホログラム

定常的な3次元超音波分布の生成
3次元的な音響エネルギ分布を計算・再現し、触感を提示した初めての研究。周囲を取り囲む超音波源による定常的な定在波により、音や気流を感じることなく、3次元物体形状を体感できる空中触覚提示を世界で初めて実現しました。
youtube 動画1
youtube 動画2
音響境界ホログラム
上記を発展させた音響境界ホログラム。並進運動・回転の6自由度全てについて、微小変動に対して正しく復元力が働く場を設計し、波長より有意に大きい自由形状物体の空中浮遊に世界で初めて成功した研究。
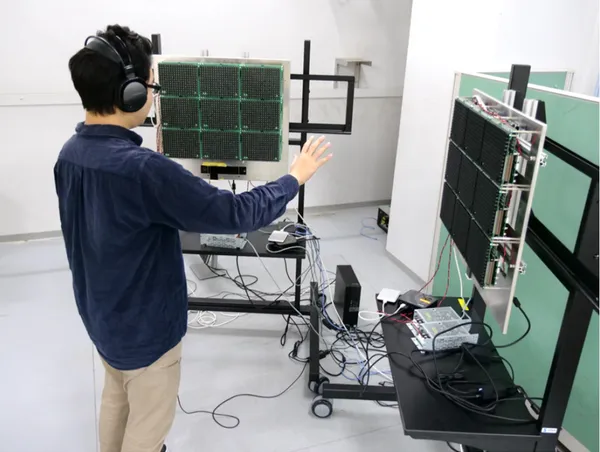
Haptoclone 視触覚クローン
お互いの高忠実3次元映像と、触覚を伴って触れ合うことができる世界初のシンメトリック・テレイグジスタンスシステム。
解説ページ
youtube 動画