We propose Hopping-Pong changing the trajectory of a moving ping-pong ball by using a non-contact ultrasound force. There are many previous researches controlling a real object using a computationally controlled force. These researches have focused on only controlling a stational object. In this research, we introduce Hopping-Pong including a concept and technological implementation of changing the trajectory of a moving object. Hopping-Pong also proposes applying the technique for augmented sports (e.g. ping-pong game).
Hopping-Pong system changes the trajectory of a moving ping-pong ball by combining high-speed measurement, prediction of the trajectory, and presentation of an ultrasound force. In Hopping-Pong, all ping-pong players can make an opponent player fail to shot. We conjecture that this curveball bridges a skill gap between beginners and advanced players and maintains beginners’ motivation. This curveball can be also used to support a practice by guiding the ball to the desired location e.g. a backhand position. As a basic technology of controlling a moving object, Hopping-Pong can be applied for removing defective samples in food production lines and modifying the trajectory of an object thrown by a human.
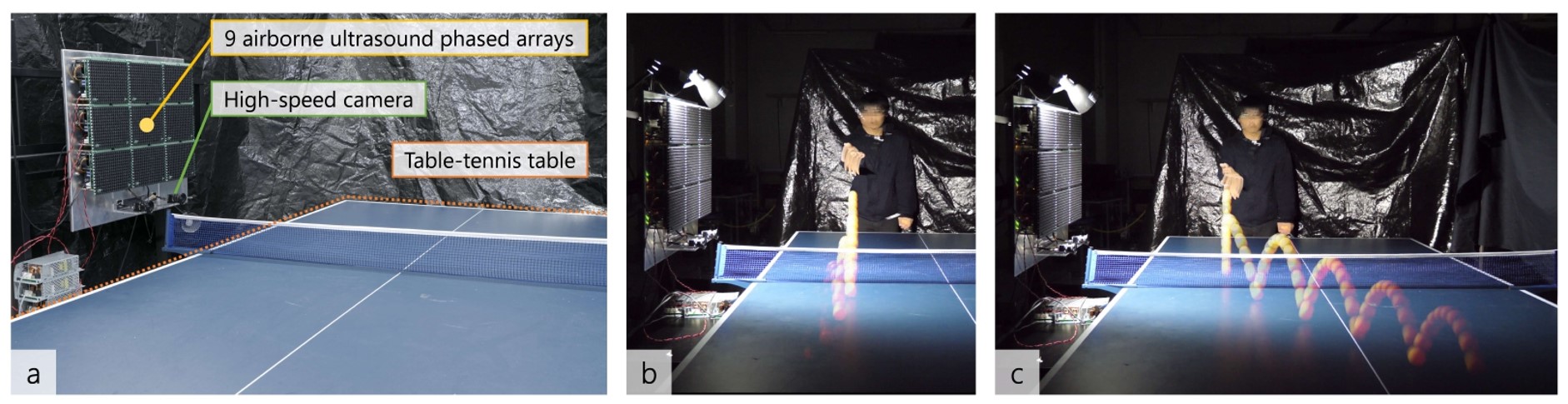
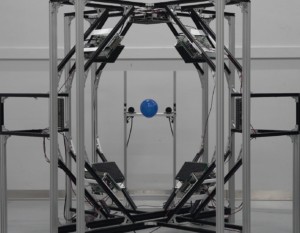
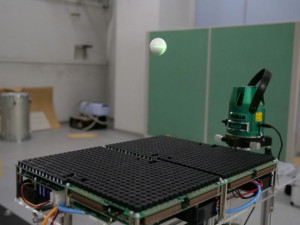
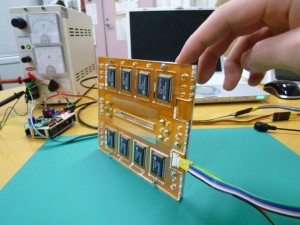
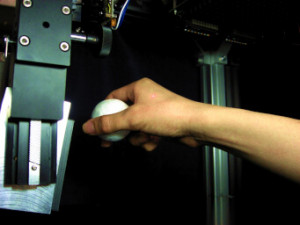
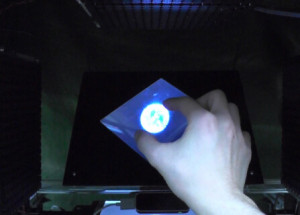
Figure 1: (a) A side view of our system configuration. This system consists of nine ultrasound phased arrays and a stereo high-speed camera. (b) A snapshot of throwing ping-pong ball. (c) A snapshot of a scene where our system dynamically changes the trajectory of a moving ping-pong ball.
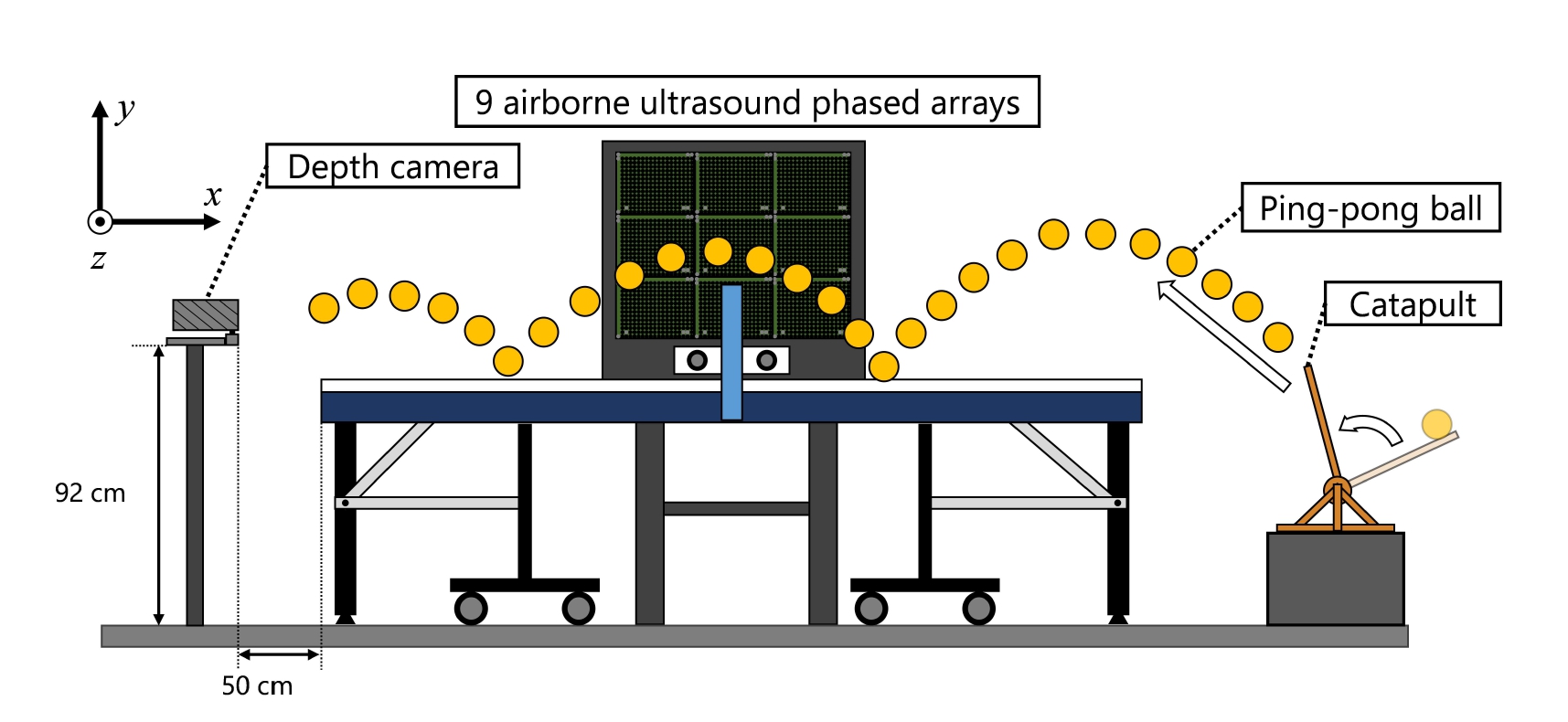
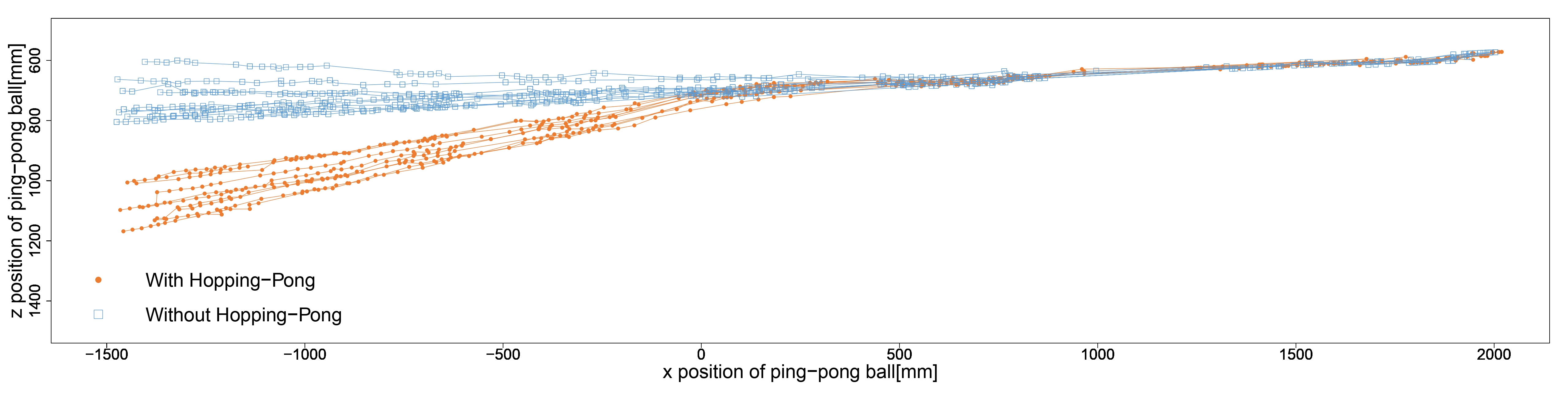
Figure 2: Experimental setup and the measured trajectory of a ping-pong ball. At the end of a ping-pong table, the displacement of the trajectory is 344 mm. The displacement is larger than a racket (150 mm).
Publication
Tao Morisaki, Ryoma Mori, Ryosuke Mori, Yasutoshi Makino, Yuta Itoh, Yuji Yamakawa, Hiroyuki Shinoda, “Hopping-Pong: Changing Trajectory of Moving Object Using Computational Ultrasound Force,” Proc. 2019 ACM International Conference on Interactive Surfaces and Spaces (ISS’19), pp. 123-133, Daejeon, South Korea, November 10-13, 2019. (Open Access) http://dx.doi.org/10.1145/3343055.3359701

Comments