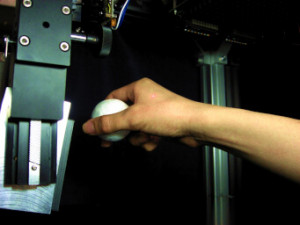
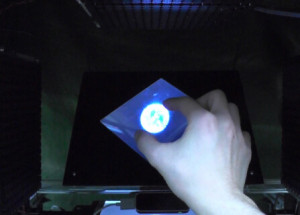
A lightweight haptic display that does not interfere with the user’s natural movement is required for an immersive haptic experience.
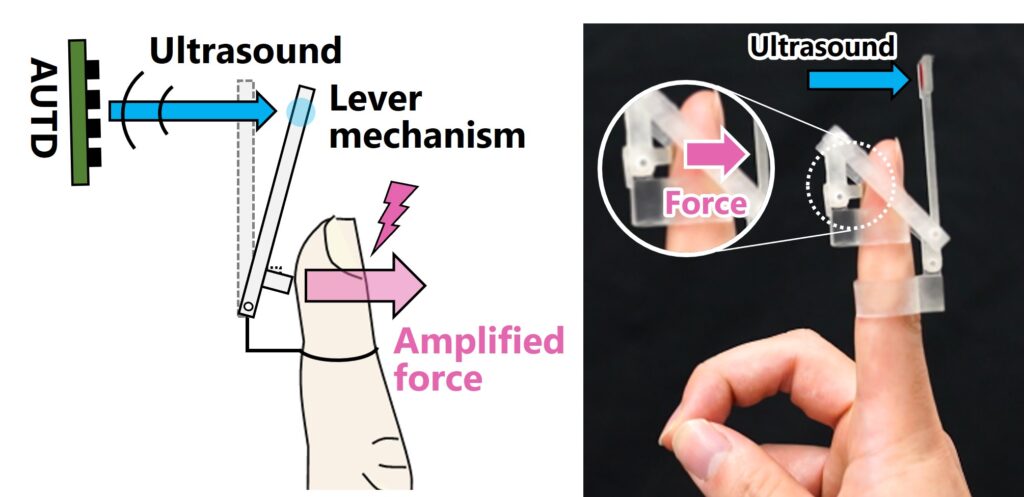
This study proposes a lightweight, powerful, and responsive passive haptic actuator driven by airborne focused ultrasound. This 6.2 g completely plastic passive device amplifies an applied ultrasound radiation force by a factor of 35 using a simple lever mechanism, presenting an amplified force of 0.7 N to the user’s finger pad. 2-30 Hz vibration can also be presented. Since the radiation force is presented at the speed of sound, the amplified force is presented at high speed even with the high amplification rate of a lever, achieving such strong force and vibration presentation.
Physical measurements showed that the amplified force was 0.7 N for the 20 mN input radiation force, and the amplitude of the presented vibration was over 0.1 N at 2-30 Hz. A psychophysical experiment showed that the vibration and force were perceivable with a device output level of -7.7 dB. In the future, we will explore methodologies around device design to present desired tactile sensations.
Publication:
Tao Morisaki, Takaaki Kamigaki, Masahiro Fujiwara, Yasutoshi Makino, and Hiroyuki Shinoda, “UltLever: Ultrasound-Driven Passive Haptic Actuator Based on Amplifying Radiation Force Using a Simple Lever Mechanism, ” IEEE Transactions on Haptics, Jan. 2024. (Open Access) doi: 10.1109/TOH.2024.3363764.
Tao Morisaki, Masahiro Fujiwara, Yasutoshi Makino, and Hiroyuki Shinoda, “Ultrasound-Driven Passive Haptic Actuator based on Amplifying Radiation Force using Simple Lever Mechanism,” SIGGRAPH ASIA 2022, Emerging Technologies.


Comments