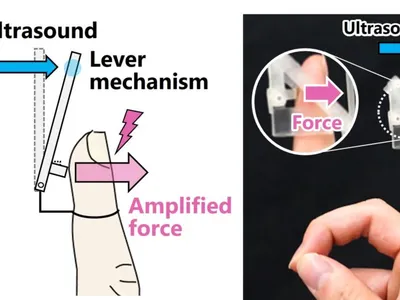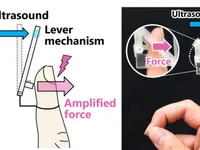
UltLever: 空中超音波で駆動するパッシブな触覚提示デバイス
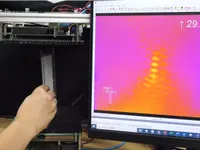
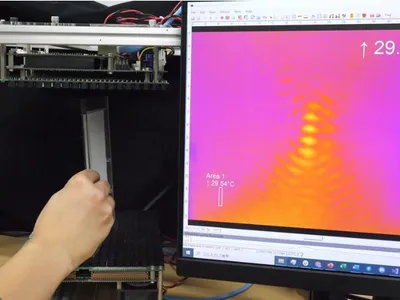
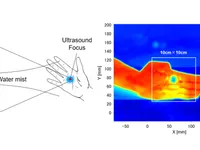
熱画像による空中超音波の2次元計測

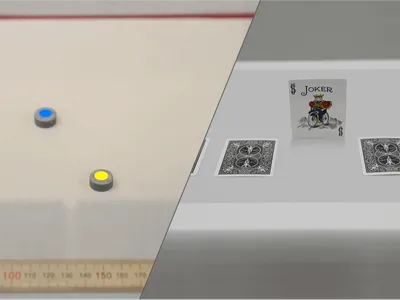
空中超音波フェーズドアレイのセンサ・フィードバック駆動による軽量物体の3次元位置制御
空中超音波の制御による遠隔冷覚提示

超音波による空中剛体浮揚
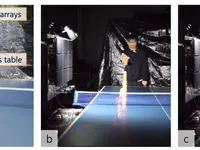
Hopping-Pong: 超音波による動的物体の軌道制御

ReFriction
空中ハプティクス(空中超音波触覚提示)

トス動作の機械学習に基づくバレーボールの球軌跡予測

映像に適切な振動の推定と付与
機械学習を用いた0.5秒後の運動のリアルタイム推定

超音波ベッセルビームによる空中匂い輸送

HaptoCloneAR

衣服の上に構成するウェアラブル・ネットワーク

触覚インタフェース

二次元通信タイル
視触覚クローン(Haptoclone)

空中触覚タッチパネル
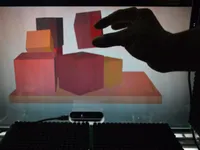
空中超音波による定在立体触覚像
超音波による表面硬さの遠隔計測

二次元通信

テラヘルツ波フェーズドアレイ
Haptics & Applied Physics in Synthesis
これから始まるハプティクス
システムの中に新しい物理現象や物理的構造を導入することで, 従来の壁を越える実世界情報環境を実現します. 特に人間,環境,その相互作用のセンシングや,感覚に働きかけて人間を支援する技術について, ハードウエアレベルからの提案を行っています. 斬新な発想に基づく基礎的・普遍的成果を目指すとともに,それらが人々の問題を解決し, 実用技術として幅広く活用されるまでのプロセスも研究のテーマに含まれます.
なかでも人間の触覚を有効活用するハプティクスに注目しています.ハプティクスは, 長らく理工学や情報学のニッチ領域と見なされてきました. しかし現在はそのシーズとニーズの両面において不連続的な変化が起きつつあります.
研究室の所属
- 東京大学 大学院新領域創成科学研究科 複雑理工学専攻
- 東京大学 大学院情報理工学系研究科 システム情報学専攻
- 東京大学 工学部 計数工学科
関連プロジェクト

News
当研究室は 大阪万博 未来の都市パビリオン 日本特殊陶業の展示「空中感覚装置」に技術協力しています。空中触感をぜひご体験下さい。