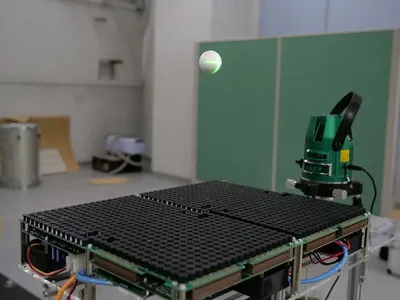
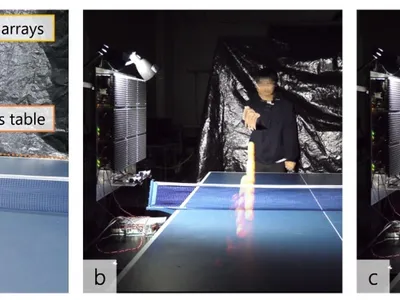
センサ情報をフィードバックし空中超音波フェーズドアレイを動的に駆動することで,軽量な物体の3次元位置を制御する技術を開発しました.
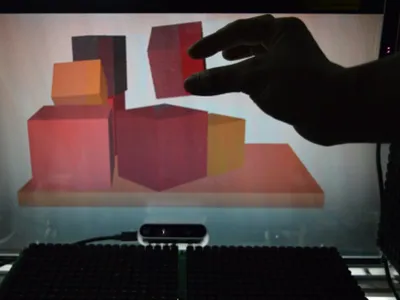
さらに,本技術を用いて制御されるバルーンに映像を投影することによって,完全にバッテリーレス・アクチュエータレスな空中ディスプレイシステムを実現しました.
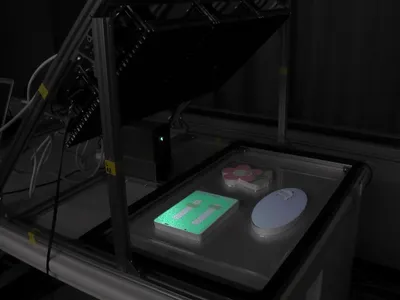
本技術の応用として,プロジェクション型の拡張現実における映像提示や,室内における気球型ロボットの駆動,宇宙構造物内等の低重力環境における物体の非接触マニピュレーション等が考えられます.
Takuro Furumoto, Masahiro Fujiwara, Yasutoshi Makino, and Hiroyuki Shinoda, “Bang-bang Control with Constant Thrust of a Spherical Blimp Propelled by Ultrasound Beam”, 2022 IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, USA (Hybrid), May 23-27, 2022.