Table of Contents
Hardware and software for the devices used in our laboratory are available at the following sites:
*For inquiries regarding usage, please use the Q&A link above. Please refrain from contacting our laboratory directly. Our laboratory receives no financial benefit from the sale of these devices.
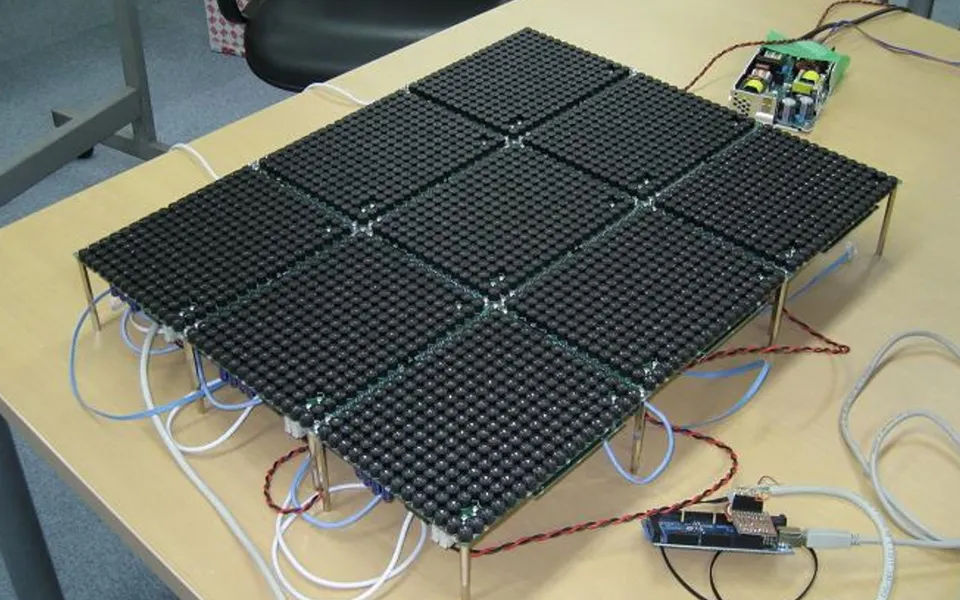
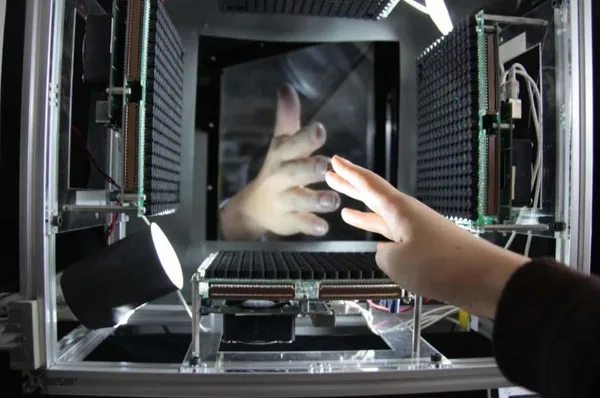
An Airborne Ultrasound Tactile Display (AUTD) uses ultrasonic transducer arrays to create ultrasound focal points or detailed distributions at arbitrary positions in midair. This allows for the presentation of tactile sensations to the human body without requiring the user to wear any equipment.
At the focal point, where energy density is high, the average pressure increases, creating a force known as acoustic radiation force that pushes against the skin. The positions of these focal points are controlled electronically, allowing them to be moved freely and instantaneously in 3D space. Furthermore, complex spatial distributions can be generated in real-time by solving inverse problems.
The field of non-contact tactile stimulation is called “Midair Haptics.” Its most fundamental aspects were proposed and established by Hiroyuki Shinoda’s group at the University of Tokyo between 2008 and the early 2010s. Since then, universities and companies worldwide have entered the field. Entering the 2020s, the University of Tokyo discovered new possibilities, and the field is now moving into its “Second Generation” phase.
The Second Generation: High Fidelity Midair Haptics
For over a decade since the initial proposal, the prevailing wisdom was that “tactile sensations generated by midair haptics are weak and limited to specific vibratory sensations.” This assumption began to shift significantly in the 2020s. Today, it has become possible to reproduce both substantial pressure sensations and sensations of heat and cold. This allows for the realistic transmission of the “physical presence” of objects with their surface textures. While the generated sensations are not yet perfect, social implementation has begun, focused on three pillars: Well-being, Learning Experiences, and Entertainment.
Realistic Reproduction of 3D Characters

Technology that effectively communicates the physical presence of soft 3D characters was exhibited and experienced at SXSW 2024 in the United States. The tactile-visual interaction was developed by Matsubayashi, while the character visuals were designed by the group led by Shinoda at Hakuhodo. In addition to character interaction, realistic sensations of rain and thunder-like effects were also reproduced. Similar tactile interactions were exhibited at Niterra’s place in the Osaka-Kansai Expo Future City Pavilion in 2025.
Reproduction of Diverse Textures

The reproduction of static pressure sensations enables the realistic experience of touching virtual surfaces. A smooth, frictionless sensation is perceived when the pressure component is varied gradually. By adding vibration and force distributions, it becomes possible to render a diverse range of textures. This is a joint research project with NTT.
Rendering Static Pressure and Temperature
Reproduction of Static Pressure Sensation
The generated ultrasonic radiation pressure is not very high.
If a time-invariant (static) pressure is applied to the skin,
the stimulus remains below the tactile threshold and is imperceptible to humans.
Therefore, conventional midair tactile presentation relies on time-varying vibrotactile
stimuli. However, this is felt as a “vibration,” which differs from the sensation of
touching an object naturally.
Recent research by Morisaki et al. has revealed that a dynamic pressure distribution
can create a sensation similar to static pressure. This finding demonstrates that
versatile tactile presentation is possible,
albeit with certain limitations on spatial resolution and maximum force.
- Tao Morisaki, Masahiro Fujiwara, Yasutoshi Makino and Hiroyuki Shinoda, "Non-Vibratory Pressure Sensation Produced by Ultrasound Focus Moving Laterally and Repetitively with Fine Spatial Step Width,"IEEE Transactions on Haptics, vol. 15, no. 2, pp. 441–450, 2022, doi: 10.1109/TOH.2021.3125843. [Open Access]
- Best Student Demonstration Award at SIGGRAPH ASIA 2021 Emerging Technologies
- 3rd Place, Best Demo Award at Eurohaptics 2022 for related research
Reproduction of Cold Sensations
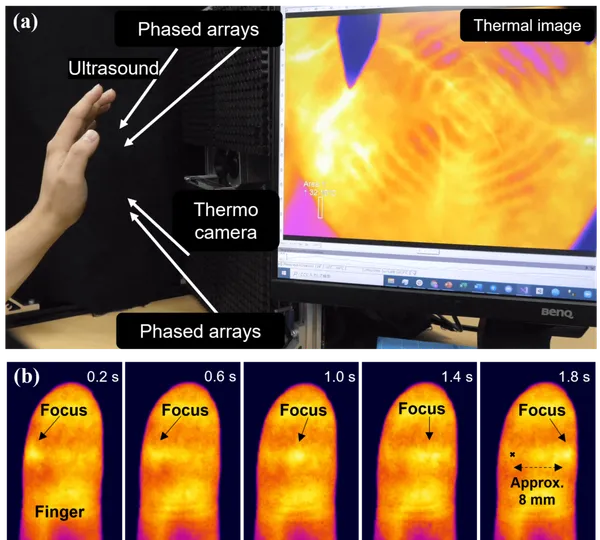
Temperature plays a vital role in perceiving texture, but non-contact temperature presentation—especially cold—was previously considered difficult. However, in 2021, Nakajima et al. confirmed that focusing ultrasound on the skin in an environment with room-temperature mist of water causes the skin temperature to drop rapidly due to the heat of vaporization near the surface. A temperature drop of 3 K was observed within 0.5 s of irradiation, which is comparable to cooling via standard Peltier elements. It was also confirmed that the movement of the cooling spot is perceptible.
- Mitsuru Nakajima, Keisuke Hasegawa, Yasutoshi Makino and Hiroyuki Shinoda, "Spatiotemporal Pinpoint Cooling Sensation Produced by Ultrasound-Driven Mist Vaporization on Skin,"IEEE Transactions on Haptics, vol. 14, no. 4, pp. 874–884, 2021, doi: 10.1109/TOH.2021.3086516. [Open Access]
- Best Paper Award 2022 from IEEE Transactions on Haptics
Visualization of Ultrasound
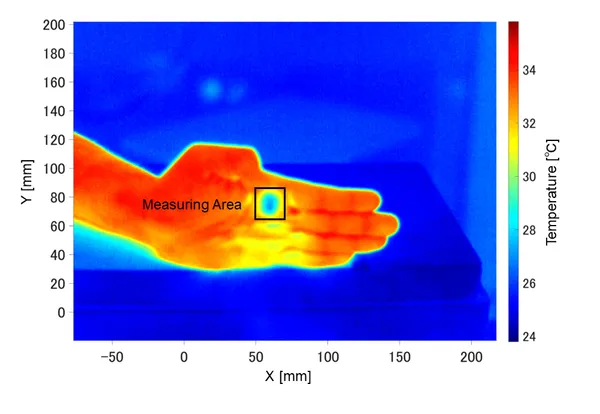
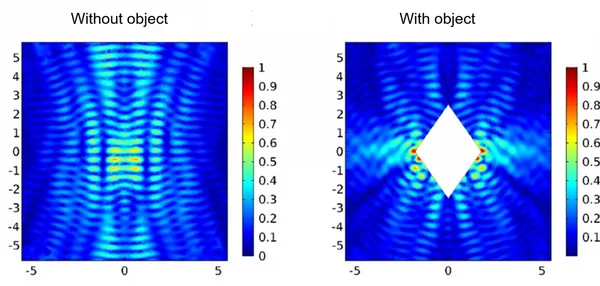
A problem with midair haptics was the measurement of the sound field distribution. Previously, the only practical method was to scan a microphone using an automatic stage or a robot arm. In 2021, Onishi et al. discovered a new practical method to measure the details of intense ultrasonic fields. Using a thermal camera, the sound pressure distribution on an arbitrary two-dimensional plane in 3D space can be measured. This measurement is conducted in real-time with a high spatial resolution. For example, a thermal image of a mesh screen inserted into the ultrasonic wave can visualize the 2D sound field distribution on the mesh instantaneously. The 3D distribution can be easily obtained by moving the screen. Furthermore, it is possible to visualize the sound field distribution directly on the skin surface.
- Ryoya Onishi, Takaaki Kamigaki, Shun Suzuki, Tao Morisaki, Masahiro Fujiwara, Yasutoshi Makino and Hiroyuki Shinoda, "Two-Dimensional Measurement of Airborne Ultrasound Field Using Thermal Images,"Phys. Rev. Applied, vol. 18, no. 4, pp. 044047, 2022, doi: 10.1103/PhysRevApplied.18.044047. [Open Access]
- arXiv (12 Mar 2022) https://arxiv.org/abs/2203.07862
Key Achievements up to 2020
Lateral Modulation: Creating Strong Tactile Sensations
In tactile stimulation using acoustic radiation pressure, the maximum force is determined by the device’s output power. Therefore, it is necessary to employ stimulation methods that feel as strong as possible within this fixed range. It has long been known that when vibrating stimuli are applied to human skin at a constant amplitude, they have a lower threshold than static ones, with sensitivity peaking around 100–200 Hz. For this reason, Amplitude Modulation (AM) at these frequencies has traditionally been used.
However, recent research has shown that keeping the output constant while rapidly vibrating or rotating the focal point along the skin—a method called Lateral Modulation (LM)—makes the stimulus feel significantly stronger. Compared to AM at the same maximum force, the threshold drops by approximately 10 dB. This trend is particularly notable at around 50 Hz, allowing tactile sensations to be clearly felt on hairy skin, such as the arm, as well as on glabrous skin.
- Ryoko Takahashi, Keisuke Hasegawa and Hiroyuki Shinoda, "Lateral Modulation of Midair Ultrasound Focus for Intensified Vibrotactile Stimuli,"in Haptics: Science, Technology, and Applications, 2018, pp. 276–288, June 13-16, Pisa, Italy.
- Ryoko Takahashi, Keisuke Hasegawa and Hiroyuki Shinoda, "Tactile Stimulation by Repetitive Lateral Movement of Midair Ultrasound Focus,"IEEE Transactions on Haptics, vol. 13, no. 2, pp. 334–342, 2020, doi: 10.1109/TOH.2019.2946136. [Open Access]
Suppression of Unwanted Noise
In methods like LM, rapid changes in ultrasound phase occur when moving the focal point quickly. Such phase changes often cause fluctuations in ultrasound amplitude, leading to changes in tactile feel or the generation of unwanted audible noise. (The occurrence of noise and amplitude fluctuations due to phase changes was first pointed out by Hoshi.) The following paper demonstrates a practical method to suppress these fluctuations.
Distribution Reproduction on Fingertips
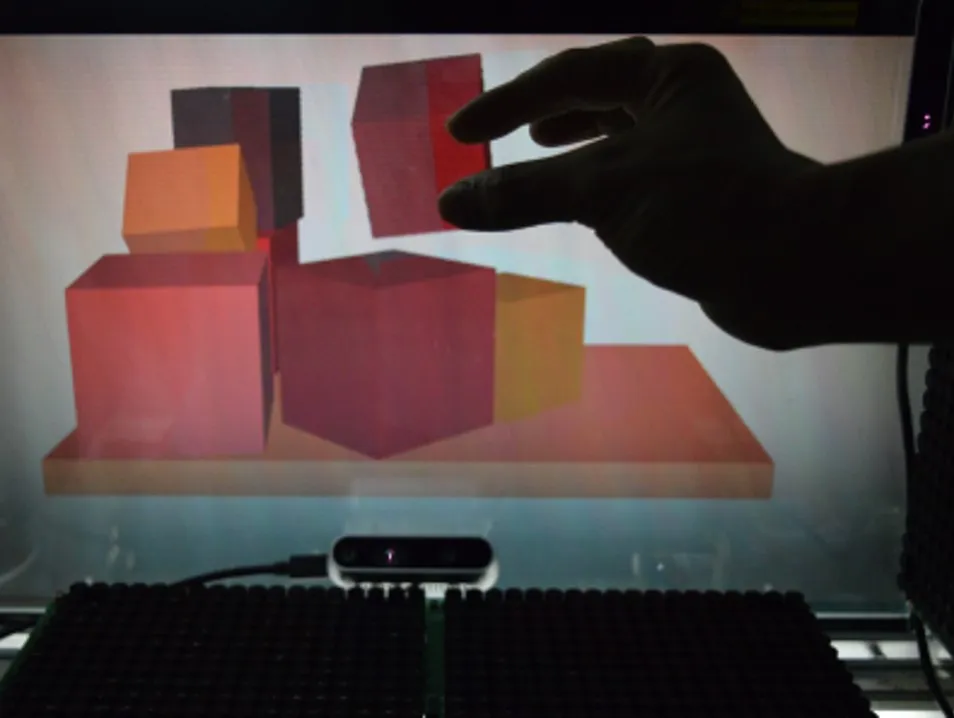
Reproducing the sensation of grasping and manipulating 3D images as if they were physical objects is a primary challenge in midair haptics. When touching a real object, the depth and angle of contact on the skin change dynamically; this sensory feedback is crucial for stable grasping. Matsubayashi et al. developed a system that presents the expansion of the contact area in response to contact depth in real-time, utilizing a high-speed rotating focal point. Even with 40 kHz ultrasound (8.5 mm wavelength), surrounding the target with a phased array allows the focal region to be localized to approximately 5 mm. By scanning this focal point, the contact area on the fingertip can be significantly varied according to the contact depth. This research demonstrates the successful execution of tasks such as picking up an object and moving it to a designated location without visual cues.
-
Atsushi Matsubayashi, Yasutoshi Makino and Hiroyuki Shinoda, "Rendering Ultrasound Pressure Distribution on Hand Surface in Real-Time,"2020, pp. 407–415, Sep. 6-9, Leiden, Netherlands, doi: 10.1007/978-3-030-58147-3_45. [Open Access]
- Best Paper Award Finalist (3 papers) at Eurohaptics 2020
- Atsushi Matsubayashi, Yasutoshi Makino and Hiroyuki Shinoda, "Direct Finger Manipulation of 3D Object Image with Ultrasound Haptic Feedback,"in Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, 2019, no. 87, pp. 1–11, May 04–09, Glasgow, Scotland Uk. [Open Access]
- Atsushi Matsubayashi, Hiroki Oikawa, Saya Mizutani, Yasutoshi Makino and Hiroyuki Shinoda, "Display of Haptic Shape Using Ultrasound Pressure Distribution Forming Cross-Sectional Shape,"in 2019 IEEE World Haptics Conference (WHC), 2019, pp. 419–424, July 9-12, Tokyo, Japan.
Motion Guidance via Haptics
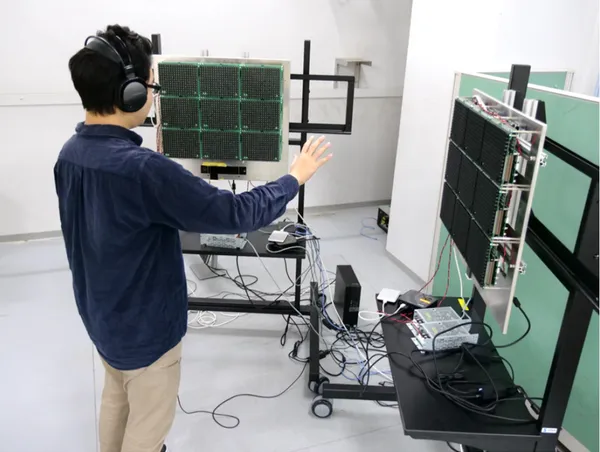
Haptic Pursuit
In vision, when a target object moves, we naturally track it while keeping it at the center of our visual field. This ability is known as “pursuit.” A similar capability, termed “Haptic Pursuit,” has been discovered in the sense of touch.
Consider a scenario in which a point-like tactile stimulus is presented to the palm and moves laterally. With midair haptics, even though no shear force occurs along the skin surface and only the pressure distribution moves, the hand can easily follow this lateral motion. By leveraging this innate human ability, it is possible to guide the hand to any desired location by moving the stimulus point toward the target destination.
Virtual Handrail (Guidance along the palm)
By presenting a point stimulus that scans along a line, the system allows the user to easily perceive the direction and follow a trajectory without visual input.
Guidance perpendicular to the palm
The Early Era: World-First Achievements at the University of Tokyo (2008–2015)
It was demonstrated that even though the force from acoustic radiation pressure is very weak, tactile sensations can be perceived by modulating it. Although different from the sensation of touching a solid object, it was proven that various tactile experiences could be created by overlaying this with visual information.
Airborne Ultrasound Tactile Display (AUTD)
The world’s first report showing that tactile sensations could be reproduced with ultrasound, organizing basic characteristics. SIGGRAPH 2008 E-tech Video
- Takayuki Iwamoto, Mari Tatezono and Hiroyuki Shinoda, "Non-contact Method for Producing Tactile Sensation Using Airborne Ultrasound,"in Haptics: Perception, Devices and Scenarios, 2008, pp. 504–513.
- Takayuki Hoshi, Masafumi Takahashi, Takayuki Iwamoto and Hiroyuki Shinoda, "Noncontact Tactile Display Based on Radiation Pressure of Airborne Ultrasound,"IEEE Transactions on Haptics, vol. 3, no. 3, pp. 155–165, 2010, doi: 10.1109/TOH.2010.4.
Touchable Holography (Interaction with midair 3D images)
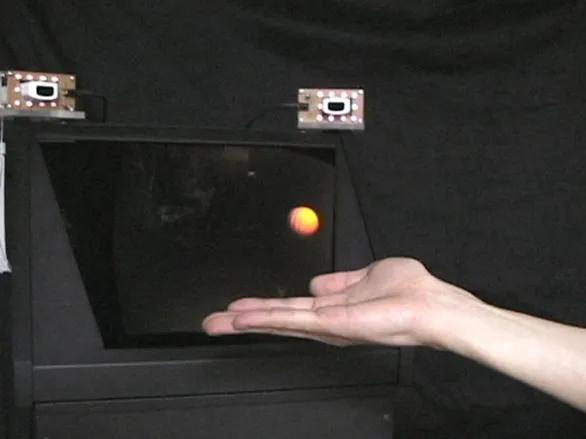
The world’s first demonstration of midair tactile presentation synchronized with midair images. SIGGRAPH 2009 E-tech Video
Tactile Projector (Simultaneous presentation of images and tactile sensations on body surface)

This research pioneered the use of synchronized multi-unit phased arrays. By aligning midair haptics with visual projections on the skin, it achieved a seamless integration of visual and passive tactile sensations in a live demonstration. (Demonstrated at World Haptics Conference 2013)
- Keisuke Hasegawa and Hiroyuki Shinoda, "Aerial Display of Vibrotactile Sensation with High Spatial-Temporal Resolution using Large-Aperture Airborne Ultrasound Phased Array,"in 2013 World Haptics Conference (WHC), 2013, pp. 31–36, April 14-18, Daejeon, Korea.
- Best Student Paper Award and Best Paper Award Finalist at IEEE WHC 2013
- Keisuke Hasegawa and Hiroyuki Shinoda, "Aerial Vibrotactile Display Based on Multiunit Ultrasound Phased Array,"IEEE Transactions on Haptics, vol. 11, no. 3, pp. 367–377, 2018, doi: 10.1109/TOH.2018.2799220. [Open Access]
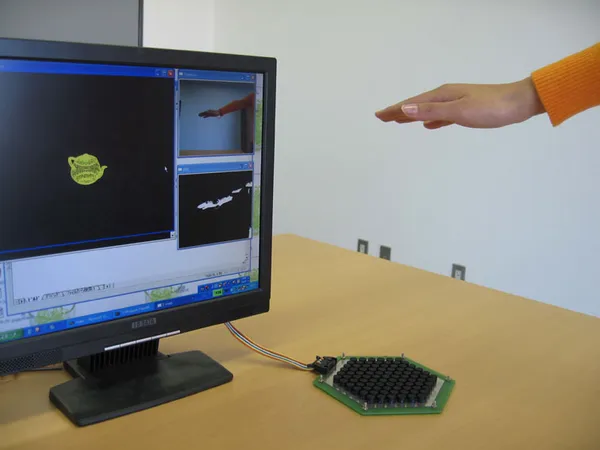
Haptomime: Midair Haptic Touch Panel

World’s first demonstration of a midair virtual touch panel. It enables users to manipulate icons in midair with the same intuitive feel as operating a physical touch panel. youtube Video
- Yasuaki Monnai, Keisuke Hasegawa, Masahiro Fujiwara, Kazuma Yoshino, Seki Inoue and Hiroyuki Shinoda, "HaptoMime: Mid-Air Haptic Interaction with a Floating Virtual Screen,"in Proceedings of the 27th Annual ACM Symposium on User Interface Software and Technology, 2014, pp. 663–667, Oct. 5-8, Honolulu, Hawaii, USA, doi: 10.1145/2642918.2647407.
- ACM UIST 2014 People’s Choice Best Demo Award
- Innovative Technologies 2014 Industry Special Prize and SIGGRAPH Special Prize
3D Haptic Holograms

Steady 3D Ultrasound Distribution
The first research to calculate and reproduce 3D acoustic energy distributions. Using steady standing waves from surrounding sources, it realized midair tactile presentation of 3D object shapes without the sensation of sound or airflow. youtube Video 1 youtube Video 2
Acoustical Boundary Hologram
The practical formalization of acoustic boundary holograms was achieved, leading to the world’s first midair levitation of free-form objects significantly larger than the wavelength. This system provides restoring forces in all six degrees of freedom, ensuring stability against external fluctuations.
Haptoclone: Haptic & Optical Clone
The world’s first symmetric telexistence system that allows users to interact with high-fidelity 3D images of each other while sharing tactile feedback. Technical Details youtube Video